
友情提醒:专利转让手续办理由十象战略合作方-重庆鼎慧峰合知识产权代理事务所(普通合伙)全程提供。
专利介绍
平台严控核验 保障专利真实有效
基本信息
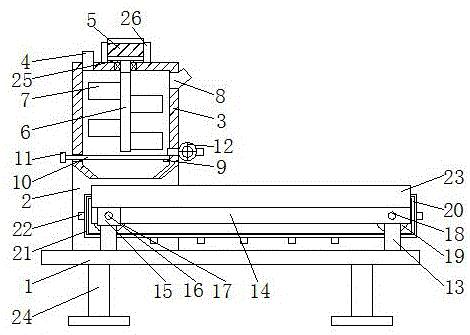
一种用于力触觉人机交互的柔性物体变形仿真方法
| 申请号 | CN201410114203.3 | 分类号 | |
|---|---|---|---|
| 申请日期 | 2014-03-26 | 有效期 | |
| 公开日期 | 2016-09-28 | 公开号 | CN103869983B |
| 发明人/设计人 | 刘**毅 | 权利人 | 南**学 |
| 专利类型 | 未知 | 十象顾问 | 刘欢 联系TA |
摘要介绍
本发明提出一种用于力触觉人机交互的柔性物体变形仿真方法,基于等边三角形分割的弹簧质点模型,将柔性物体的变形视为由于作用力从局部区域内的表面质点逐层地、顺序地传播到组织内的各个质点,直至到达某预设的边界为止;并不需要对变形物体作整体考虑,而是有效地将计算资源集中投入到局部区域里的质点。本方法的计算只涉及柔性物体表面的局部区域内的质点,变形区域由接触力决定,分割精度可以根据准确性要求调整,不仅大大简化了计算量,加快了变形计算的速度,且调整灵活,适用范围广泛,可应用于具有各向同性的柔性物体在平稳接触下的变形情况,例如虚拟外科手术仿真、遥操作机器人控制等虚拟现实人机交互领域。
交易保障
平台担保 资金安全 交易无忧

平台严选专利
平台严控专利真伪,保障专利真实可靠无权益纠纷

专属顾问 全程包办
平台一对一专属顾问,挑选到转让过户,全程包办

用户隐私 绝密保护
平台承诺用户隐私信息绝对
保密,不外传、不他用

专利闲置,免费寄售
平台购买的专利闲置,平台
提供0服务费为您售卖
过户资料
买方提供资料
个人身份证
公司或个体营业执照
购买后获得证书
专利证书
专利登记簿副本
手续合格通知书